
Montaż oraz konfiguracja GPS’u w dronie FPV
Montaż systemu GPS do drona nie należy do rzeczy trudnych, a może przynieść wiele korzyści, jednak należy przemyśleć taką opcję, ponieważ może być ona nawet niebezpieczna dla zdrowia i życia. Z drugiej strony zamontowanie w dronie GPS może uratować naszą maszynę przed zgubieniem, opcja szczególnie ważna podczas lotów long range, gdy zostanie zgubiony zasięg. Posiadanie systemu GPS pozwala również na zaprogramowanie lotu i wykonywanie go potem całkowicie autonomicznie bez podawania przez pilota instrukcji za pomocą aparatury.
Jednak GPS posiada wiele wad jak i zalet.
Zaletami GPS są:
– Możliwość poglądu koordynatorów GPS na OSD, dzięki czemu możemy potem ustalić pozycję drona z nagrania DVR z gogli FPV
– Możliwość zastosowania powrotu do miejsca startu po utracie zasięgu, dzięki czemu nie stracimy drona, a szanse na jego odzyskanie wzrastają
– Możliwość tworzenia misji, dzięki którym dron będzie leciał do kolejno ustawionych punktów
– Możliwość utrzymywania drona w zadanej pozycji.
Wady:
– Przy błędnej konfiguracji może dojść do niebezpiecznych sytuacji kiedy nasz dron zapamięta błędną pozycję startu i po podłączeniu zasilania wzniesie się i będzie chciał wrócić do pozycji startu którą ma zapisaną np. z wcześniejszego lotu
– Zwiększenie wagi maszyny
– Dron musi latać na otwartej przestrzeni aby sygnał GPS był odpowiednio silny
Na rynku możemy znaleźć wiele systemów w różnych rozmiarach, różnych funkcjach np. z wbudowanym kompasem oraz działających na różnych protokołach:

Powyżej możemy zobaczyć 3 popularne modele modułów GPS:
– BN-220 z anteną o rozmiarze 18x18mm
– BN-880 z kompasem anteną o rozmiarze 28x28mm
– M8Q-5883 z kompasem oraz anteną 15x15mm
Większa antena powinna zapewniać większą dokładność sygnału GPS oraz szybkość w odnajdywaniu satelit jednak odbywa się to kosztem dodatkowej wagi oraz rozmiaru co w mniejszych maszynach może być istotne. Antena 15 x 15mm zapewnia najlepszy kompromis między wydajnością anteny polaryzacyjnej RHCP a niewielkim rozmiarem, która może być zintegrowana z dowolnym urządzeniem.

Po otrzymaniu modułu GPS możemy zobaczyć na jego antenie rysy, nie są one wynikiem słabej kontroli jakości lub wadą spowodowaną przez producenta. Są to rysy powstałe w skutek dostrajania anteny przez producenta do odpowiedniej częstotliwości działania. Anteny są strojne, ponieważ drobne zmiany takie jak miejsce lutowania czy ułożenie elementów może powodować zmiany w częstotliwości, na jakiej działa antena.
Montaż GPS w zależności od wybranej przez nas wersji oraz od kontrolera lotu jaki posiadamy może się różnić. Posiadając kontroler lotu Zeus F722 producent daje możliwość użytkownikowi podłączenie systemu GPS w prosty sposób za pomocą wtyczki oraz przewodów które są dołączone do zestawu, nawet nie wymagane jest lutowanie przewodów. Użytkownik jedynie musi, zatroszczyć się o dobrą polaryzację oraz ich kolejność w wtyczce. Błędna kolejność podłączenia może doprowadzić do uszkodzenia naszych podzespołów.



Zamontowanie systemu GPS do innych kontrolerów lotu wymaga lutowania, ale również nie jest to trudne i odbywa się w to podobny sposób jak w przypadku użycia wtyczki. Podczas podłączenia nie zaleca się korzystania przez SoftSerial tylko przez port UART, przewody oraz pady należy połączyć w następujący sposób:
SDA -> SDA (Pad występujący tylko w GPS z kompasem)
SCL -> SCL (Pad występujący tylko w GPS z kompasem)
RX -> TX
TX -> RX
5V ->5V
Po podłączeniu przewodów możemy przejść do konfiguracji za pomocą oprogramowania zgodnym z zainstalowanym na kontrolerze lotu. Konfiguracja będzie przedstawiona na oprogramowaniu Betaflight, ponieważ jest najpopularniejsze, w innych pokrewnych oprogramowaniach proces będzie wyglądał w sposób analogiczny.
Po wejściu w zakładkę konfiguracja zgodny z naszym oprogramowaniem należy przejść do zakładki porty:

Należy pamiętać o wyborze dobrego portu UART, można to określić na postawie nazewnictwa portów na płytce, jeśli przylutowaliśmy przewody do np.TX2 oraz RX2 oznacza to, że korzystamy z portu UART2, następnie w kolumnie „Wejście czujnika” należy wybrać „GPS”, jeśli nie znamy prędkości na jakiej pracuje nasz moduł należy wybrać auto, jednak nie zawsze oprogramowanie ustali odpowiednią prędkość więc jeżeli nasz moduł nie będzie działał należy się upewnić, że została wybrana odpowiednia prędkość transmisji. Należy zapisać ustawienia klikając przycisk w prawym dolnym rogu „Zapisz i zrestartuj”
Po ponownym połączeniu się kontrolera z komputera w zakładce „Konfiguracja” należy włączyć system GPS i go skonfigurować.
Aby to uczynić należy odnaleźć takie pole:

Po włączeniu GPS’u będziemy mieli możliwość konfiguracji GPS’u w takim panelu:
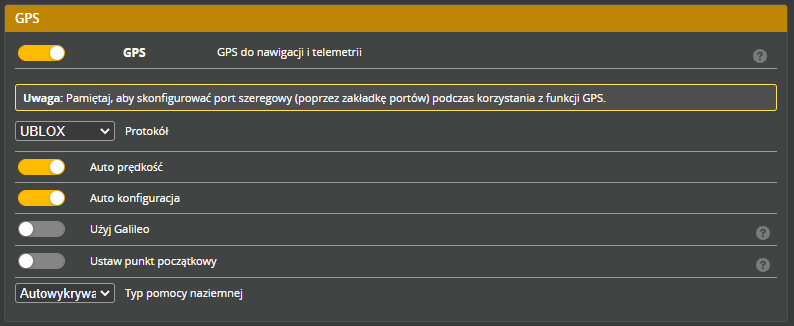
- Protokół – należy wybrać odpowiedni dla modułu, który posiadamy, mamy do wyboru protokoły UBLOX oraz NMEA które są najpopularniejsze, możemy wybrać również protokół MSP, który jest mniej popularny. Moduły firmy Beitian domyślnie korzystają z protokołu UBLOX. Jeśli nie jesteśmy pewni z jakiego protokołu korzysta moduł który posiadamy możemy próbować różnych protokołów bez obaw, nie możemy w ten sposób uszkodzić modułu ani kontrolera lotu.
- Auto prędkość – Kontroler automatycznie ustala prędkość z jaką odbywa się komunikacja z modułem. Zaleca się włączenie tej opcji.
- Auto konfiguracja – Kontroler automatycznie ustala konfigurację zgodną z modułem. Zaleca się włączenie tej opcji.
(Opcje dostępne tylko z uruchomioną auto konfiguracją)- Użyj Galileo – Po włączeniu przestajemy korzystać z japońskiego systemu nawigacji QZSS, a zastępuje go europejski system Galileo.
- Typ pomocy naziemnej – Tą opcję zaleca się zostawić w trybie autowykrywania. Posiadamy możliwe do wyboru opcje takie jak:
-Europejski EGNOS (wspomagający systemy GPS i GLONASS)
-WAAS (System nawigacji powietrznej)
– Japoński MSAS (wspiera DGPS – różnicowy sygnał GPS)
-Indyjski GAGAN (rozszerzona nawigacja wspomagana GPS-em)
-Brak
- Ustaw punkt początkowy – Po włączeniu tej opcji pierwsze uzbrojenie drona po podłączeniu baterii będzie zapamiętane jako stały punkt z którego startuje dron. Kiedy ta opcja będzie wyłączona za każdym razem, kiedy uzbroimy drona punkt początkowy będzie aktualizowany. Przed włączeniem tej opcji warto przemyśleć czy jest na pewno ona dla nas w pełni korzystna, ponieważ może dojść do takiej sytuacji, że przeniesiemy przypadkowo drona w inne miejsce włączymy funkcje powrotu do miejsca startu, a on wystrzeli w górę chcąc wrócić w miejsce startu co może być niebezpieczne kiedy w pobliżu stoją osoby.
Po podstawowej konfiguracji i zapisaniu ustawień powinniśmy widzieć na górnym pasku symbol aktywnego GPS, jeśli nasza konfiguracja jest nie poprawna będzie dalej widoczny jako nieaktywny.

Jeśli chcemy zobaczyć czy nasz moduł GPS działa poprawnie i wskazuje poprawną lokalizację należy włączyć tryb eksperta a następnie przejść do zakładki GPS która się pojawi.

Jeśli wszystkie informacje się zgadzają i GPS działa możemy przystąpić do konfiguracji Failsafe lub dodać koordynaty GPS do danych wyświetlanych na OSD w naszych goglach. Wiele gogli ma możliwość nagrywania obrazu widzianego przez pilota, a następnie odtworzenie nagrania na goglach lub na komputerze, . Dzięki wyświetlanym danym możemy np. znaleźć miejsce gdzie dron spadł lub urwał nam się zasięg.
Aby włączyć możliwość odczytywania danych na OSD, należy przejść do zakładki OSD następnie wybrać opcję wyświetlania długości i szerokości geograficznej GPS i przeciągnąć koordynaty na podglądzie w dogodne dla nas miejsce. Dzięki GPS możemy również wyświetlać takie dane jak prędkość, ilość satelitów, jaka została wykryta przez nasz moduł czy odległość od „domu” czyli miejsca startu naszego drona.

Ustawienie failsafe z użyciem opcji GPS możemy ustawić, uruchamiając tryb eksperta i przechodząc do zakładki failsafe. Jednak należy pamiętać, że jest to opcja ratująca nasz model tylko przed zgubieniem, model nie wyląduje idealnie w tym samym miejscu istnieje szansa, że wróci ale np. wyląduje na pobliskim drzewie lub upadnie w pobliżu miejsca startu. Należy też pamiętać, że jeśli nasze napięcie akumulatora będzie zbyt niskie powrót do miejsca startu może się nie udać. Mimo wszystko jest to lepszą opcją niż zgubienie modelu większej odległości od nas i potem poszukiwanie go za pomocą nagrania z DVR lub tylko korzystając z tego co zapamiętaliśmy.

Należy zwrócić szczególną uwagę na opcję „pozwól na uzbrojenie bez FIX-a” ponieważ wtedy cała procedura ratowania naszego modelu traci, sens ponieważ nie może zadziałać. Warto również zastanowić się nad opcją „Trybu wysokości”:
- Maksymalna wysokość – dron będzie wracał na wysokości początkowej (domyślna wartość to 50m) lub będzie wracał na najwyższej zarejestrowanej wysokości do której zostanie dodane +15m co powinno zapewnić, że nasz dron nie uderzy w np. drzewo nad którym lecieliśmy
- Stała wysokość – dron będzie zawsze próbował powrócić na wysokości ustalonej jako „Początkowa wysokość”
- Aktualna wysokość – Dron będzie próbował powrócić na wysokości na której się znajduje kiedy została aktywowana procedura powrotu do domu (jest to nie zalecana opcja)
Warto również pomyśleć o włączeniu opcji „sprawdzenie kontrolne” która to sprawdza:
- Czy GPS jest wciąż podłączony do kontrolera lotu
- Czy GPS ma wystarczającą ilość satelit, aby powrócić do miejsca startu
- Czy dron nie doznał mocnych wstrząsów (prawdopodobnie w wyniku kolizji z jakimś obiektem np. drzewem)
- Czy ilość satelitów jest równa lub większa od zadeklarowanej w polu „Minimalna ilość satelitów”
- Czy dron zmierza w odpowiednim kierunku do domu
Po ustawieniu wybranych przez nas opcji warto przetestować działanie systemu, możemy przypisać przełącznik uruchamiający procedurę odpowiedzialną za testowanie.

Loty autonomiczne są możliwe w innych systemach np. iNav wtedy wskazujemy dronowi punkty do których ma zmierzać i on będzie za nimi podążał.
Zamontowanie oraz konfiguracja oprogramowania do współpracy GPS z naszym dronem FPV nie należy do rzeczy trudnych, a w wielu sytuacjach może uratować naszą maszynę przed ucieczką. Jednak należy pamiętać, że nie jest to w pełni autonomiczny system pozwalający na lądowanie w tym samym miejscu, w którym wystartowaliśmy. Jeśli nie korzystamy z GPS pod względem failsafe również może nam pomóc w przypadku zgubienia maszyny i potrzeby poszukiwania jej dzięki współrzędnym wyświetlanych na OSD możliwym do odtworzenia później z nagrania DVR. Również dzięki zamontowaniu GPS możemy sprawdzić prędkości jakie osiągamy dronem.